 |
SatAndLight
2.2.2-hubble
Simulation toolkit for space telescopes
|
|
SatAndLight
2.2.2-hubble
Simulation toolkit for space telescopes
|
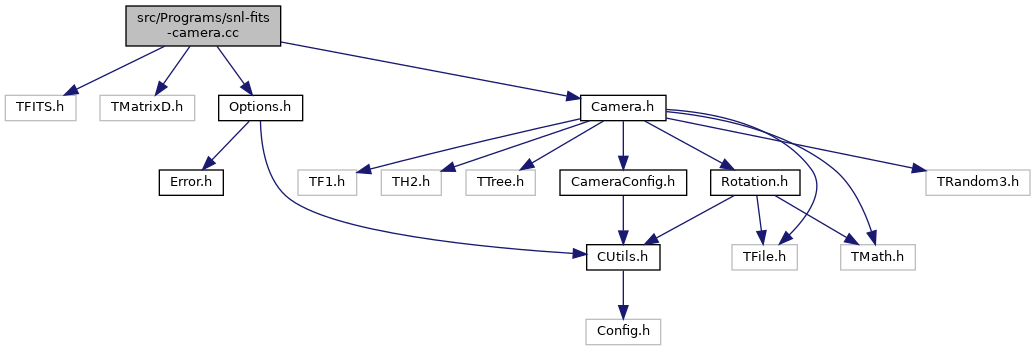
This program generates a camera data sequence from FITS data files. More...
Functions | |
| int | main (int argc, char *argv[]) |
| This program generates a camera data sequence from FITS data files. More... | |
This program generates a camera data sequence from FITS data files.
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
This program generates a camera data sequence from FITS data files.
The input FITS files are converted in a sequence of camera pictures saved in ROOT files. A list of FITS files must be provided. The following assumptions are made about the format of these files:
The files are read sequentially. For each of them a ROOT file is produced in the current direvctory. Camera pictures are saved using the Camera class.
| [in] | argc | Number of arguments. |
| [in] | argv | List of arguments. |
 2.2.2-hubble
2.2.2-hubble